介绍
本文将使用TSAL6200发射头和HS0038接收头传递信号。HS0038会输出解码完成的信号并以高低电频方式输出。
输入捕获
通过tim IC功能实现输入中断,来测量两trigger间时间差。
由于接红外接收头连接于PA1,这里选用TIM5 channel 2实现中断。
cubeMX选中TIM5 channel 2 Input Capture direct mode, 勾选Internal Clock。
Prescaler= 72-1
Counter Period= 65535(0XFFFF) //越大越好,尽量减少溢出次数
auto-reload= enable
记得设置NVIC优先级。
tim.c
需要在init之后加入
1
2
| HAL_TIM_Base_Start_IT(&htim5); //开启计时中断
HAL_TIM_IC_Start_IT(&htim5,TIM_CHANNEL_2); //开启输入中断
|
计数器溢出回调函数。计数溢出次数,并标记一些重要内容。
RmtSta[(0<=接收标记)00(0<=high trigger标记) (0000<=4bits counter)]
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim==(&htim5))
{
if(RmtSta&0x80)//1000 0000 start receiving
{
RmtSta&=~0X10; //cancle the rising mark
if((RmtSta&0X0F)==0X00)RmtSta|=1<<6;//0100 0000 finishing a receive
if((RmtSta&0X0F)<14)RmtSta++;
else //(RmtSta&0X0F)=15
{
RmtSta&=~(1<<7);
RmtSta&=0XF0;
}
}
}
}
|
输入中断回调函数。计算一个周期内的时间差,交替设置high/down trigger中断来实现高/低电频时间测量。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
| void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim==(&htim5))
{
if (HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1))
{
TIM_RESET_CAPTUREPOLARITY(&htim5,TIM_CHANNEL_2); //reset configuration (important)
TIM_SET_CAPTUREPOLARITY(&htim5,TIM_CHANNEL_2,TIM_ICPOLARITY_FALLING); //interrept in falling edge
__HAL_TIM_SET_COUNTER(&htim5,0); //reset timer
RmtSta|=0X10; //0001 0000
}
else
{
Dval=HAL_TIM_ReadCapturedValue(&htim5,TIM_CHANNEL_2); //get time difference
TIM_RESET_CAPTUREPOLARITY(&htim5,TIM_CHANNEL_2);
TIM_SET_CAPTUREPOLARITY(&htim5,TIM_CHANNEL_2,TIM_ICPOLARITY_RISING); //interrept in rising edge
RmtSta&=~(1<<4); //000(1<-0) 0000
}
}
|
之后将Dval加上溢出的时间就得到完整的高/低电频时间了。
NEC协议
NEC协议遵从以下规则:

每条命令会由一个起始信号,8位地址,8位反位地址,8位cmd,8位反位cmd和若干repeat信号组成。
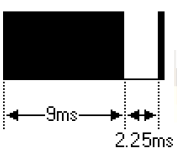
起始信号会产生9ms高信号和4.5ms低信号,
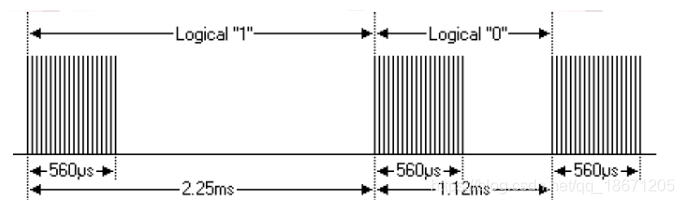
发射逻辑“1”会产生560μs高信号和1690μs低信号,
发射逻辑“0”会产生560μs高信号和560μs低信号,
repeat会产生9ms高信号和2.25ms低信号。
但是接收头却会反调接收的高信号和低信号,如接收逻辑“1”会产生560μs低信号和1690μs高信号。
由于接收的高信号足以区分不同codes,因此可以只检测高信号长度来解码。
按钮信号
通过测试正点原子配套的遥控器,得如下结果:
按7X3位置排序cmd码
162 | 098 | 226
034 | 002 | 194
224 | 168 | 144
104 | 152 | 176
048 | 024 | 122
016 | 056 | 090
066 | ( n ) | 082
tim.c
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
|
TIM_HandleTypeDef htim2;
TIM_HandleTypeDef htim5;
/* TIM2 init function */
void MX_TIM2_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim2.Instance = TIM2;
htim2.Init.Prescaler = 7200-1;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 5000-1;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
HAL_TIM_Base_Start_IT(&htim2);
}
/* TIM5 init function */
void MX_TIM5_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_IC_InitTypeDef sConfigIC = {0};
htim5.Instance = TIM5;
htim5.Init.Prescaler = 72-1;
htim5.Init.CounterMode = TIM_COUNTERMODE_UP;
htim5.Init.Period = 65535;
htim5.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim5.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim5) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim5, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_IC_Init(&htim5) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim5, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI;
sConfigIC.ICPrescaler = TIM_ICPSC_DIV1;
sConfigIC.ICFilter = 0;
if (HAL_TIM_IC_ConfigChannel(&htim5, &sConfigIC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
HAL_TIM_Base_Start_IT(&htim5);
HAL_TIM_IC_Start_IT(&htim5,TIM_CHANNEL_2);
}
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(tim_baseHandle->Instance==TIM2)
{
/* TIM2 clock enable */
__HAL_RCC_TIM2_CLK_ENABLE();
/* TIM2 interrupt Init */
HAL_NVIC_SetPriority(TIM2_IRQn, 10, 0);
HAL_NVIC_EnableIRQ(TIM2_IRQn);
}
else if(tim_baseHandle->Instance==TIM5)
{
/* TIM5 clock enable */
__HAL_RCC_TIM5_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**TIM5 GPIO Configuration
PA1 ------> TIM5_CH2
*/
GPIO_InitStruct.Pin = GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* TIM5 interrupt Init */
HAL_NVIC_SetPriority(TIM5_IRQn, 2, 0);
HAL_NVIC_EnableIRQ(TIM5_IRQn);
}
}
void HAL_TIM_Base_MspDeInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM2)
{
/* Peripheral clock disable */
__HAL_RCC_TIM2_CLK_DISABLE();
/* TIM2 interrupt Deinit */
HAL_NVIC_DisableIRQ(TIM2_IRQn);
}
else if(tim_baseHandle->Instance==TIM5)
{
/* Peripheral clock disable */
__HAL_RCC_TIM5_CLK_DISABLE();
/**TIM5 GPIO Configuration
PA1 ------> TIM5_CH2
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_1);
/* TIM5 interrupt Deinit */
HAL_NVIC_DisableIRQ(TIM5_IRQn);
}
}
static uint8_t RmtSta=0,RmtCnt=0;
uint8_t count=0;
uint16_t Dval;
static uint32_t RmtRec;
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim==(&htim2))
{
LED_switch(LED0);
}
if(htim==(&htim5))
{
if(RmtSta&0x80)//1000 0000 start receiving
{
RmtSta&=~0X10; //cancle the rising mark
if((RmtSta&0X0F)==0X00)RmtSta|=1<<6;//0100 0000 finishing a receive
if((RmtSta&0X0F)<14)RmtSta++;
else //(RmtSta&0X0F)=15
{
RmtSta&=~(1<<7);
RmtSta&=0XF0;
}
}
}
}
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim==(&htim5))
{
if (HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1))
{
TIM_RESET_CAPTUREPOLARITY(&htim5,TIM_CHANNEL_2);
TIM_SET_CAPTUREPOLARITY(&htim5,TIM_CHANNEL_2,TIM_ICPOLARITY_FALLING);
__HAL_TIM_SET_COUNTER(&htim5,0);
RmtSta|=0X10; //0001 0000
}
else
{
Dval=HAL_TIM_ReadCapturedValue(&htim5,TIM_CHANNEL_2);
TIM_RESET_CAPTUREPOLARITY(&htim5,TIM_CHANNEL_2);
TIM_SET_CAPTUREPOLARITY(&htim5,TIM_CHANNEL_2,TIM_ICPOLARITY_RISING);
if (RmtSta&0X80)//1000 0000
{
if(Dval>300&&Dval<800) //560us logic 0
{
RmtRec<<=1;
RmtRec|=0;
count++;
}else if(Dval>1400&&Dval<1800) //1680us logic 1
{
RmtRec<<=1;
RmtRec|=1;
count++;
}else if(Dval>2200&&Dval<2600) //2.25us
{
RmtCnt++;
RmtSta&=0XF0;
}
if (count==32)
{
printf(" [%d %d %d %d]\r\n",(RmtRec&0XFF000000)>>24,(RmtRec&0X00FF0000)>>16,(RmtRec&0X0000FF00)>>8,RmtRec&0X000000FF);
count=0;
}
}
else if(Dval>4200&&Dval<4700) //4.5ms
{
RmtSta|=1<<7; //1000 0000
RmtCnt=0;
}
RmtSta&=~(1<<4); //000(1<-0) 0000
}
}
}
uint8_t get_radio(void)
{
uint8_t check=0,add=0;
if (RmtSta&0x40)//0100 0000
{
printf("start getting\r\n");
if (((RmtRec&0XFF000000)>>24==(~RmtRec&0X00FF0000)>>16)&&((RmtRec&0X0000FF00)>>8==(~RmtRec&0X000000FF))) check=1;
if (check) {add=((RmtRec&0X0000FF00)>>8); printf("add=%d\r\n",add);}
if (check==0||(RmtSta&0x80)==0)
{
RmtCnt=0;
RmtSta&=~(0x40);//0(1<=0)00 0000
printf("stop checking");
}
}
return add;
}
|
tim.h
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
|
extern "C" {
/* Includes ------------------------------------------------------------------*/
extern TIM_HandleTypeDef htim2;
extern TIM_HandleTypeDef htim5;
void MX_TIM2_Init(void);
void MX_TIM5_Init(void);
uint8_t get_radio(void);
}
|
实例
LED0做指示灯会循环开关。oled会显示按下的按钮cmd编号。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
|
/* USER CODE BEGIN PV */
uint8_t startMessage[]="start communication \r\n";
uint8_t aRxBuffer[10];
void SystemClock_Config(void);
int main(void)
{
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* Configure the system clock */
SystemClock_Config();
LED_Init();
OLED_Init();
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
MX_USART1_UART_Init();
MX_TIM5_Init();
OLED_ShowString(0,0,"Ray test",24);
OLED_ShowString(0,32,"address=000",16);
OLED_Refresh_Gram();
/* Infinite loop */
uint8_t radio_num=0;
while (1)
{
radio_num=get_radio();
if (radio_num)
{
OLED_ShowNum(64,32,radio_num,3,16);
OLED_Refresh_Gram();
}
HAL_Delay(10);
radio_num=0;
}
}
|